++++++++++++++++++++++++++++++++++++++++++
本文系本站原创,欢迎转载! 转载请注明出处:
http://blog.csdn.net/mr_raptor/article/details/6556258
++++++++++++++++++++++++++++++++++++++++++
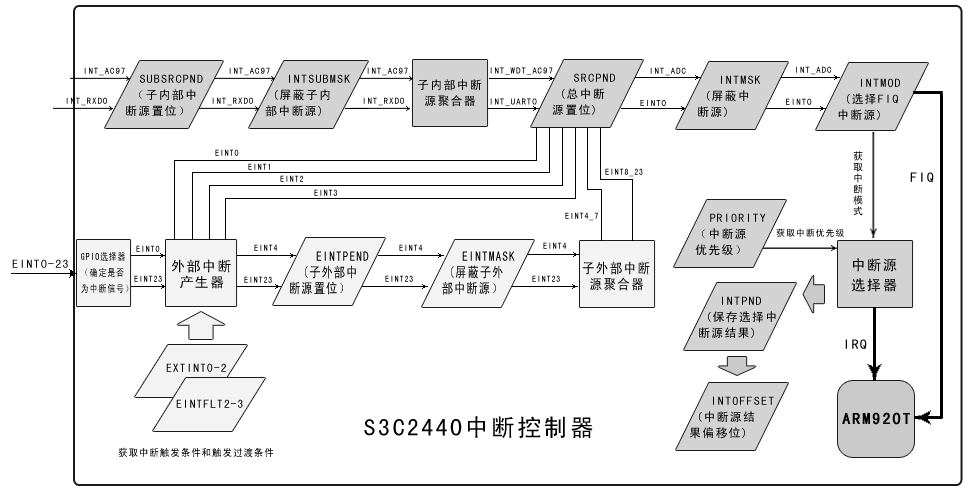
中断源按照硬件位置分为外部中断源和内部中断源,外部中断源和内部中断源又包含子外部中断源和子内部中断源,如上图所示(画了一整天)。
1.
子内部中断源的产生
以UART0接收数据产生INT_RXD0中断为例,INT_RXD0产生后进入SUBSRCPND子中断源暂存寄存器,设置INT_RXD0对应的中断位,中断信号经过INTSUBMSK子中断屏蔽寄存器,如果INT_RXD0信号对应位没有被置位(屏蔽掉),中断信号继续向前传递,经过子内部中断源聚合器,将INT_RXD0聚合成对应的中断源信号INT_UART0,设置SRCPND中断源暂存寄存器里INT_UART0位,经过INTMSK中断屏蔽寄存器,如果INT_UART0信号没有被屏蔽掉,中断信号进入INTMOD中断模式寄存器判断是否为快速中断,如果被编程为快速中断,直接打断ARM内核,进入中断处理,如果中断信号为一般中断,进入中断优先级仲裁器进入优先级仲裁,如果INT_UART0信号为最高优先级或只有INT_UART0中断信号产生,则该中断信号被记录到INTPND最高优先级中断暂存寄存器,同时设置INTOFFSET的值为中断号28,最终将中断信号打断ARM内核进行中断处理。如果同时产生多个中断且INT_UART0不是最高优先级,则该中断信号不会被处理,等最高优先级信号处理完后,再次进行优先级仲裁,也就是说中断信号不消失,一直保存在SRCPND里,只到被处理为止。
2.
内部中断源的产生
该过程在子内部中断处理过程中已经包含,中断信号产生后直接进入SRCPND里,然后经历上述子内部中断后期处理过程。
3.
子外部中断的产生
外部中断源共有24个,其中EINT0~EINT3为外部中断源,EINT4_7,EINT8_23为复合中断源,他们包含有子外部中断源。
由于外部硬件直接挂接到I/O Ports(详见S3C2440A硬件手册第9章)上的,我们要想让外设硬件中断得到处理,要先从EINT0~EINT23里选择中断信号,我们以EINT11为例,介绍子外部中断处理过程。
通常CPU内部引出引脚都是复用的,也就是说一根CPU引脚可以有多种功能,可以设置其为输入信号线,输出信号线或中断信号线,要想让硬件产生中断,首先要对可以产生中断的引脚进行编程,设置该引脚为中断信号线。EINT11中断信号对应CPU引脚为GPG3,通过设置GPGCON[7:6]
= 0b10,可以设置该引脚为中断信号线。
表3-14 GPGCON寄存器

设置了CPU管脚为中断信号线之后,还要通过设置EXTINT0寄存器来指定中断信号的触发方式:高电平触发,低电平触发,电平上升沿,下除沿,双沿触发。

图3-9
电平信号触发示意图
由于按键按下时让它产生中断,也就是从高电平变为低电平时产生(上节按键中断原理),因此我们设置EINT11中断信号的触发方式为下降沿触发,EXTINT1[14:12]
= 0b01x
表3-15 EXTINT1寄存器

设置完触发方式之后,当外设中断信号线上的电平达到触发条件时,通过外部中断产生器产生中断信号,然后将子外部中断暂存寄存器EINTPND中对应的EINT11位置1,中断信号再进入EINTMSK子外部中断屏蔽寄存器,如果EINT11中断源信号没有被屏蔽,则EINT11中断信号进入子外部中断聚合器,复合成EINT8_23中断信号,然后再经历与前面子内部中断信号一样的处理机制。
(1)EINTPEND外部中断暂存寄存器
表3-16外部中断暂存寄存器(EINTPEND)
|
寄存器名
|
地址
|
是否读写
|
描述
|
复位默认值
|
|
EINTPEND
|
0x560000A8
|
R/W
|
外部中断信号暂存寄存器
0:没有中断请求信号
1:中断请求信号产生
|
0x0000000
|
|
EINTPEND
|
位
|
描述
|
初始值
|
|
EINT23
|
[23]
|
0 = 未产生中断 1 =
产生中断
|
0
|
|
…
|
…
|
…
|
…
|
|
EINT4
|
[4]
|
0 = 未产生中断 1 =
产生中断
|
0
|
|
保留位
|
[3:0]
|
无
|
0000
|
(2)EINTMASK外部中断屏蔽寄存器
表3-17外部中断屏蔽寄存器(EINTMASK)
|
寄存器名
|
地址
|
是否读写
|
描述
|
复位默认值
|
|
EINTMASK
|
0x560000A4
|
R/W
|
外部中断信号屏蔽寄存器
0:未屏蔽,中断可用
1:屏蔽中断信号
|
0x000FFFFF
|
|
EINTMASK
|
位
|
描述
|
初始值
|
|
EINT23
|
[23]
|
0 = 未屏蔽1 =
屏蔽中断
|
1
|
|
…
|
…
|
…
|
…
|
|
EINT4
|
[4]
|
0 = 未屏蔽1 =
屏蔽中断
|
1
|
|
保留位
|
[3:0]
|
无
|
1111
|
4.
外部中断源的产生
外部中断产生过程读者可以根据上面中断图自行分析。
本实验分三个版本,分别针对三种开发板:友善之臂QQ2440,友善之臂MINI2440,天嵌TQ2440。每种开发板对应工程在:“sys_irq_开发板名”目录下。下面实验内容为针对MINI2440开发板。
head.s:
主要实现安装异常向量表,处理复位异常,初始化必要硬件,中断入口处理等功能。
;**********************************************************************
;
系统中断实验(MINI2440)
;**********************************************************************
GPBCON
EQU 0x56000010
GPBDAT
EQU 0x56000014
EXPORT SYS_IRQ
AREA SYS_IRQ,CODE,READONLY
ENTRY
;**********************************************************************
; 设置中断向量,除Reset和HandleIRQ外,其它异常都没有使用(如果不幸发生了,
; 将导致死机)
;**********************************************************************
; 0x00: 复位Reset异常
b Reset
; 0x04:
未定义异常(未处理)
HandleUndef
b HandleUndef
; 0x08:
软件中断异常(未处理)
HandleSWI
b HandleSWI
; 0x0c:
指令预取异常(未处理)
HandlePrefetchAbt
b HandlePrefetchAbt
; 0x10:
数据访问中止异常(未处理)
HandleDataAbt
b HandleDataAbt
; 0x14:
未使用异常(未处理)
HandleNotUsed
b HandleNotUsed
; 0x18:
一般中断异常,跳往HandleIRQ
b HandleIRQ
; 0x1c:
快速中断异常(未处理)
HandleFIQ
b HandleFIQ
Reset
; 复位异常处理入口
; 关闭看门狗
ldr r0, = 0x53000000
mov r1, #0
str r1, [r0]
bl initmem
ldr sp, =0x32000000
; 设置管理模式栈指针
IMPORT uart_init
bl uart_init
; UART串口初始化
IMPORT irq_init
bl irq_init
; 系统中断初始化
IMPORT key_init
bl key_init
; 按键初始化
IMPORT led_init
bl led_init
; LED灯初始化
msr
cpsr_cxsf, #0xd2
; 切换到中断模式下
ldr sp, =0x31000000
; 设置中断模式栈指针
msr cpsr_cxsf, #0x13
; 返回管理模式
ldr lr, =halt_loop
; 设置管理模式下返回地址
IMPORT main
ldr pc, =main
; 跳入主函数main里执行
;***********************************************************************
; 中断处理
;***********************************************************************
HandleIRQ
sub lr,lr,#4
; 修正返回地址
stmdb sp!,{r0-r12,lr}
; 保存程序执行现场
ldr lr,=int_return
; 设置中断处理程序返回地址
IMPORT handle_irq
ldr pc,=handle_irq
; 跳入中断处理程序
int_return
; 中断处理返回标签
ldmia sp!,{r0-r12,pc}^
恢复程序执行现场,返回继续执行
halt_loop
b halt_loop
initmem
ldr
r0, =0x48000000
ldr r1, =0x48000034
;ldr r2, =memdata
adr r2, memdata
initmemloop
ldr r3, [r2], #4
str r3, [r0], #4
teq r0, r1
bne initmemloop
mov pc,lr
memdata
DCD 0x22000000
;BWSCON
DCD 0x00000700
;BANKCON0
DCD 0x00000700
;BANKCON1
DCD 0x00000700
;BANKCON2
DCD 0x00000700
;BANKCON3
DCD 0x00000700
;BANKCON4
DCD 0x00000700
;BANKCON5
DCD 0x00018005
;BANKCON6
DCD
0x00018005 ;BANKCON7
DCD 0x008e07a3
;REFRESH
DCD 0x000000b1
;BANKSIZE
DCD 0x00000030
;MRSRB6
DCD 0x00000030
;MRSRB7
END
; 代码结束
该程序主要设置异常向量表,除了Reset异常和中断处理被处理以外,其它异常都未被处理,如果发生时,会产生死循环,Reset异常里主要实现了硬件的基本初始化,如:按键,LED灯等,设置栈指针,用于执行C程序,最后跳入C程序的main函数。在中断处理异常处理中首先修正返回地址,保存用户执行现场,跳入到中断处理例程中执行。
sys_init.c:
硬件初始化文件,里面包含LED,KEY的初始化函数。
#include "register.h"
#include "comm_fun.h"
#define
TXD0READY (1<<2) //发送数据状态OK
#define
RXD0READY (1)
//接收数据状态OK
/* UART串口初始化
*/
void uart_init()
{
GPHCON |= 0xa0; //GPH2,GPH3 used as TXD0,RXD0
GPHUP = 0x0;
//GPH2,GPH3内部上拉
ULCON0 = 0x03;
//8N1
UCON0 = 0x05;
//查询方式为轮询或中断;时钟选择为PCLK
UFCON0 = 0x00; //不使用FIFO
UMCON0 = 0x00;
//不使用流控
UBRDIV0 = 12;
//波特率为57600,PCLK=12Mhz
}
/* UART串口单个字符打印函数
*/
extern void putc(unsigned char c)
{
while( ! (UTRSTAT0 & TXD0READY) );
UTXH0 = c;
}
/* UART串口接受单个字符函数
*/
extern unsigned char getc(void)
{
while( ! (UTRSTAT0 & RXD0READY) );
return URXH0;
}
/* UART串口字符串打印函数
*/
extern int printk(const char* str)
{
int i = 0;
while( str[i] ){
utc( (unsigned char) str[i++] );
}
return i;
}
/*
按键初始化 */
int key_init()
{
//
设置K1,K2,K3,K4,K5,K6对应控制寄存器为中断模式
GPGCON = (2<<0) | (2<<6) | (2<<10) | (2<<12) | (2<<14) | (2<<22);
/*
01x falling edge triggered下降沿触发
10x Rising edge triggered上升沿触发
11x Both edge triggered双沿触发
*/
// 设置K1,K2,K3,K4,K5按键中断触发方式为上升沿触发
EXTINT1 = (3<<0) | (3<<12) | (3<<20) | (3<<24) | (3<<28);
EXTINT2 = (3<<12); //
设置K6按键中断触发方式为上升沿触
printk("按键初始化OK/r/n");
return 0;
}
/* Led1~Led4初始化*/
#define LED1
(1<<5) //LED1 GPBDAT[5]
#define LED2
(1<<6) //LED2 GPBDAT[6]
#define LED3
(1<<7) //LED3 GPBDAT[7]
#define LED4
(1<<8) //LED4 GPBDAT[8]
/*
点亮对应num号led灯
*/
extern int led_on(int num)
{
switch(num)
{
case 1:
GPBDAT = GPBDAT & ~LED1; break;
case 2:
GPBDAT = GPBDAT & ~LED2; break;
case 3:
GPBDAT = GPBDAT & ~LED3; break;
case 4:
GPBDAT = GPBDAT & ~LED4; break;
default:
return 0;
}
return num;
}
/*
关闭num号led灯
*/
extern int led_off(int num)
{
switch(num)
{
case 1:
GPBDAT = GPBDAT | LED1; break;
case 2:
GPBDAT = GPBDAT | LED2; break;
case 3:
GPBDAT = GPBDAT | LED3; break;
case 4:
GPBDAT = GPBDAT | LED4; break;
default:
return 0;
}
return num;
}
/*
关闭全部led灯
*/
extern int all_led_off(void)
{
GPBDAT = GPBDAT | LED1 | LED2 | LED3 | LED4;
return 0;
}
/* led灯初始化
*/
int led_init(void)
{
GPBCON = 0x15400; //设置GPB7为输出口
all_led_off();
printk("led初始化OK/r/n");
return 0;
}
/*
中断初始化 */
void irq_init(void)
{
// 打开KEY1~KEY6的屏蔽位
INTMSK &= ~(1<<5);
EINTMASK &= ~((1<<8) | (1<<11) | (1<<13) | (1<<14) | (1<<15) | (1<<19));
printk("中断初始化OK/r/n");
}
该文件是相关硬件初始化程序,主要包含了看门狗驱动,按键驱动,系统中断驱动,LED驱动。
handle_irq.c:
中断处理函数,查出中断源,中断处理,清除中断源。
#include "register.h"
#include "comm_fun.h"
#define EINT_Key_REQUEST
5 // Key中断源中断号(6个按键全部使用外部子中断)
#define K1_EINT_BIT
(1<<8) // K1外部子中断位
#define K2_EINT_BIT
(1<<11) // K2外部子中断位
#define K3_EINT_BIT
(1<<13) // K3外部子中断位
#define K4_EINT_BIT
(1<<14) // K4外部子中断位
#define K5_EINT_BIT
(1<<15) // K5外部子中断位
#define K6_EINT_BIT
(1<<19) // K6外部子中断位
/*
系统中断处理函数 */
void handle_irq()
{
unsigned long irqOffSet = INTOFFSET; //
取得中断号
all_led_off();
// 关闭全部Led灯
if(EINT_Key_REQUEST==irqOffSet){
// Key中断产生(6个按键使用一个总中断号)
if(K1_EINT_BIT & EINTPEND){
led_on(1);
// 点亮Led1
printk("Key1 pressed/r/n");
EINTPEND &= K1_EINT_BIT; // 清除外部子中断源
}else if(K2_EINT_BIT & EINTPEND){
led_on(2);
// 点亮Led2
printk("Key2 pressed/r/n");
EINTPEND &= K2_EINT_BIT; // 清除外部子中断源
}else if(K3_EINT_BIT & EINTPEND){
led_on(3);
// 点亮Led3
printk("Key3 pressed/r/n");
EINTPEND &= K3_EINT_BIT; // 清除外部子中断源
}else if(K4_EINT_BIT & EINTPEND){
led_on(4);
// 点亮Led4
printk("Key4 pressed/r/n");
EINTPEND &= K4_EINT_BIT;
// 清除外部子中断源
}else if(K5_EINT_BIT & EINTPEND){
all_led_off(1);
// 熄灭全部Led
printk("Key5 pressed/r/n");
EINTPEND &= K5_EINT_BIT; // 清除外部子中断源
}else if(K6_EINT_BIT & EINTPEND){
all_led_on();
// 点亮全部Led
printk("Key6 pressed/r/n");
EINTPEND &= K6_EINT_BIT; // 清除外部子中断源
}
}
SRCPND &= (1<<irqOffSet);
// 清除中断源
INTPND = INTPND;
// 清除中断结果
}
main.c:
包含主函数和延时函数,主要实现字符串的循环打印。
#include "register.h"
#include "comm_fun.h"
/*
延时 */
void delay(int msec)
{
int i, j;
for(i = 1000; i > 0; i--)
for(j = msec*10; j > 0; j--)
/* do nothing */;
}
/*
主函数 */
int main()
{
while(1)
{
printk("main函数在运行.../r/n");
delay(5); //delay
}
return 0;
}
++++++++++++++++++++++++++++++++++++++++++
本文系本站原创,欢迎转载! 转载请注明出处:
http://blog.csdn.net/mr_raptor/article/details/6556258
++++++++++++++++++++++++++++++++++++++++++
分享到:





相关推荐
验证的代码详细分析了基于ARM嵌入式系统的异常处理流程,本文结合经过实际验证的代码对ARM9中断处理流程进行分析,并设计出基于S3C2410芯片的外部中断处理程序。 Arm9 arm9处理器 arm处理器 嵌入式系统 嵌入式 S3...
计算机技术中,由于某种异步事件的发生而迫使程序执行流程发生转移的现象叫做中断。 产生异步事件的原因叫做中断源。凡是中断源在发生异步事件时,都会向处理器发出一个通知信号,由于这个信号具有请处理器中止...
PIE模块复用8个外设中断引脚向CPU申请中断,这些中断被分成12组,每组有一个中断信号向CPU申请中断。例如,PIE第l组复用CPU的中断1(NT1),PIE第12组复用CPU的中断12(INT12... 一旦PIE控制器有中断产生,相应的中断
同步中断指的是由CPU控制单元产生,之所以称之为同步,是因为只有一条指令执行完毕后才会发出中断。例如除法运算中,除数为零的时候,就会产生一个异常。异步中断是由外部设备按照CPU的时钟随机产生的。例如,网卡检测到...
在嵌入式系统的硬件结构中,通常只有一个8位或16位的CPU,不仅要完成主流程的工作,同时还要处理随时发生的各种中断,因而嵌入式系统中的串口通信程序设计与PC机有很大的不同。若嵌入式系统中.中断服务子程序在系统...
1、闹钟(报警)功能:产生定时中断或激活系统 2、自动计算闰年 3、无2000 年问题 4、独立的电源输入 5、支持毫秒级时间片中断,为RTOS 提供时间基准读/ 写寄存器 ...
2-3-5 ARM 10 Thumb嵌入式系统微处理器系列 2-3-6 ARM RISC嵌入式系统微处理器的应用 2-3-7 相关数据查询 2-4 Intel公司StrongARM微处理器 2-4-1 StrongARM架构 2-4-2 SA 1110/SA 1111模拟实验版 2-4-3 ...
在ARM状态下,系统有足够的私有寄存器,从而可以避免对寄存器保存的需求,并减小了系统上下文切换的开销。 若将CPSR的F位置为1,则会禁止FIQ中断;若将CPSR的F位清零,则处理器会在指令执行时检查FIQ的输入。注意...
29 1-4-3 软硬件网络无线集成 30 1-4-4 创意产生与实现 33 1-5 本书导读 36 第2章 嵌入式SoC硬件系统概论 37 2-1 嵌入式系统微处理器的发展 38 2-1-1 4位以及8位嵌入式系统微处理器 40 2-1-2 ...
C/OS-Ⅱ移植的条件:1在程序中可以开关中断2处理器支持中断并能产生定时中断3处理器支持中断且容纳一定数据的硬件堆栈4处理器有将堆栈指针和其他CPU存储器存储读取到堆栈的指令。 9.了解一个完整的基于C/OS-Ⅱ...
嵌入式系统课程设计报告课程名称: 嵌入式系统课程设计 项目名称: 基于ARM实现MP3音乐盒 专 业: 电子科学与技术 一、 设计内容基本功能: 预存四首歌曲,实现循环播放; 每个按键对应一首歌曲。 拓展功能: 通过...
openGauss是一款开源的关系型数据库管理系统,它具有多核高性能、全链路安全性、智能运维等企业级特性。 openGauss内核早期源自开源数据库PostgreSQL,融合了华为在数据库领域多年的内核经验,在架构、事务、存储...
最近几年高频电路与数位电路共享相同电路板,构成所谓的混载电路系统似乎有增加的趋势,类似如此的设计经常会造成数位电路动作时,高频电路却发生动作不稳定等现象,其中原因之一是数位电路产生的噪讯,影响高频电路...
2.2 创建 Nios 系统模块......................................................................................................10 2.2.1 创建新的 .bdf ........................................................
(1)修改中断禁止部分 # if defined(CONFIG_S3C2410) ldr r1, =0x7ff /*根据 2410 芯片手册,INTSUBMSK 有 11位可用 */ ldr r0, =INTSUBMSK Create PDF files without this message by purchasing novaPDF ...
2.1 系统构架 25 2.2 存储器组织 27 2.3 存储器映像 28 2.3.1 嵌入式SRAM 29 2.3.2 位段 29 2.3.3 嵌入式闪存 30 2.4 启动配置 33 3 CRC计算单元(CRC) 34 3.1 CRC简介 34 3.2 CRC主要特性 34 3.3 CRC功能...